Explore blocking vs non-blocking queues, differences, and implementation.
How do we implement a non-blocking queue? What are the differences between blocking and non-blocking algorithms?
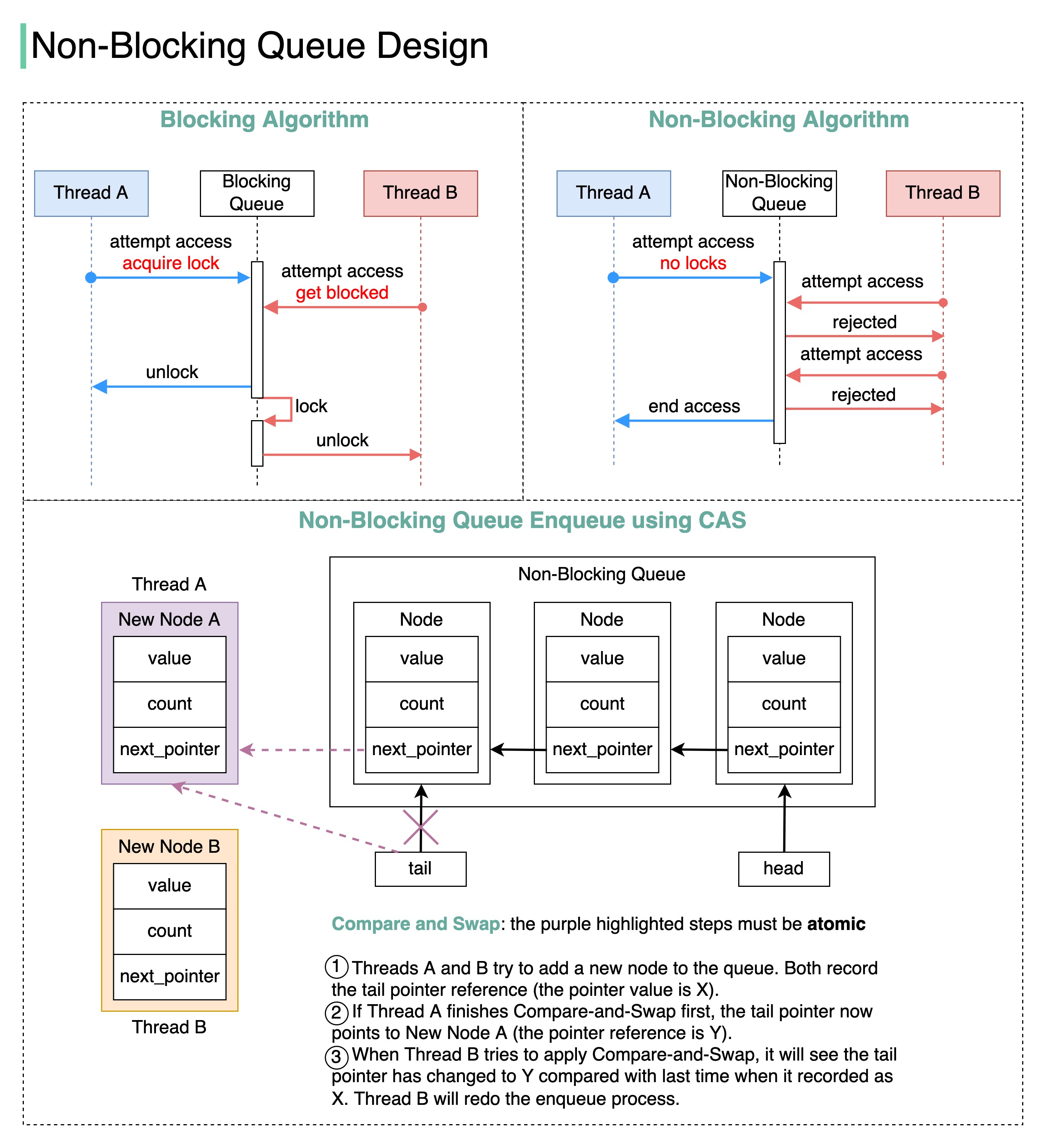
The terms we use when discussing blocking and non-blocking algorithms can be confusing, so let’s start by reviewing the terminology in the concurrency area with a diagram.
Blocking
The blocking algorithm uses locks. Thread A acquires the lock first, and Thread B might wait for arbitrary lengthy periods if Thread A gets suspended while holding the lock. This algorithm may cause Thread B to starve.
Non-blocking
The non-blocking algorithm allows Thread A to access the queue, but Thread A must complete a task in a certain number of steps. Other threads like Thread B may still starve due to the rejections.
This is the main difference between blocking and non-blocking algorithms: The blocking algorithm blocks Thread B until the lock is released. A non-blocking algorithm notifies Thread B that access is rejected.
Starvation-free
Thread Starvation means a thread cannot acquire access to certain shared resources and cannot proceed. Starvation-free means this situation does not occur.
Wait-free
All threads can complete the tasks within a finite number of steps.
𝘞𝘢𝘪𝘵-𝘧𝘳𝘦𝘦 = 𝘕𝘰𝘯-𝘉𝘭𝘰𝘤𝘬𝘪𝘯𝘨 + 𝘚𝘵𝘢𝘳𝘷𝘢𝘵𝘪𝘰𝘯-𝘧𝘳𝘦𝘦
We can use Compare and Swap (CAS) to implement a non-blocking queue. The diagram below illustrates the algorithm.
No thread suspension. Thread B can get a response immediately and then decide what to do next. In this way, the thread latency is greatly reduced.
No deadlocks. Threads A and B do not wait for the lock to release, meaning that there is no possibility of a deadlock occurring.
